


ROBOTIQUE | Робототехника
20 февраля 2019
Робот Flippy помогает готовить гамбургеры в ресторане
В одном из ресторанов сети быстрого питания CaliBurger, расположенном в г. Пасадена, штат Калифорния, на кухне появился помощник, который использует машинное зрение и технологию глубокого обучения.
Это робот Flippy, созданный компанией Miso Robotics, который занимается поджариванием лепешек для бургеров, выполняя полный цикл работы. Шеф-повару остается лишь положить начинку.
По данным Miso Robotics, Flippy создан как недорогой, автономный робот для использования на кухнях ресторанов, не требующий специальной модификации. Робот берет на себя утомительную работу, наблюдая за процессом прожаривания и переворачивая лепешки.
Flippy не просто часами стоит возле горячей, брызжущей маслом плиты, он может определить степень прожаривания и передает шеф-повару готовую продукцию для сборки бургера. Кроме того, он способен адаптироваться к обстановке, чтобы не ударить своим манипулятором человека.
Генеральный директор Miso Robotics Дэвид Зито говорит: «Наша система во многом напоминает беспилотные автомобили, она постоянно обучается на собственном опыте, чтобы стать совершеннее с течением времени. Хотя мы начинаем с относительно простой задачи приготовления гамбургеров, наше фирменное программное обеспечение с ИИ позволяет кухонным помощникам адаптироваться и, следовательно, они могут быть обучены почти любым утомительным, грязным или опасным работам на кухне, будь то жарка курицы, резка овощей или окончательное комплектование блюда».
Flippy пока еще является опытной моделью, но в начале следующего года планируется начать работу по его внедрению на кухни ресторанов Caliburgers по всему миру, К 2019 году должны работать 50 роботов. Компания отмечает, что замещаемые работники будут переведены в обеденный зал, где человеческое общение с клиентами является более предпочтительным.


«Носимый» роботизированный инструмент для хирургов
Группа исследователей под руководством университета Западной Англии из Бристоля занимается разработкой носимой роботизированной системы для минимально инвазивной хирургии, также известной как артроскопическая хирургия.
Новый инструмент должен будет обеспечить хирургу естественные ловкие движения, а также способности чувствовать, видеть, контролировать и безопасно перемещаться в операционной среде.
Проект под названием SMARTsurg финансируется Европейской комиссией в рамках программы HORIZON 2020 на сумму 4 миллиона евро.
Минимально инвазивная хирургия меняет традиционный подход к операциям с «открытым доступом». Обеспечивается снижение потери крови и снижается риск инфекций, что приводит к более быстрому послеоперационному восстановлению пациента. Наиболее совершенные роботизированные системы смогут заменить лапароскопические инструменты для хирургии в ряде клинических областей.
Основываясь на запросах клинической медицины, исследователи будут разрабатывать современные биомедицинские инструменты, которые имитируют сложные движения и чувствительность рук человека. Надетые на руку хирурга, они способны без ограничений передавать его движения, обеспечивая полноценные ощущения. Это позволит снизить общие требования к профессиональной подготовке.
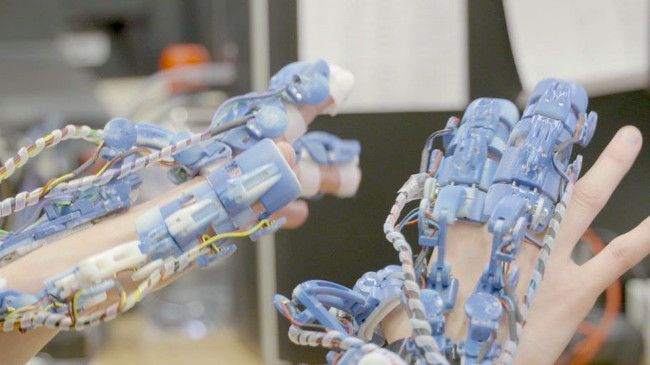
Три ключевые части оборудования будут отправной точкой в разработке новой хирургической роботизированной системы. Экзоскелет будет соответствовать размерам руки хирурга, который будет контролировать инструмент внутри тела. Недавно разработанный хирургический захват имитирует большой палец и два других пальца руки
Инструмент внутри тела будет иметь тактильные способности, что позволяет хирургу «чувствовать» внутренние ткани и органы также, как они это делают во время обычной операции. Носимый экзоскелет на руке хирурга позволит более интуитивные движения, а также даст хирургу чувство осязания. Система, разработанная в рамках этого проекта, основное внимание будет уделять тактильной обратной связи на пальцах хирурга.
Прототип робо-инструмента был разработан исследователями из лаборатории Bristol Robotics под руководством д-ра Антонии Тземанаки. Кроме того, исследователи будут разрабатывать смарт-очки, которые позволят хирургу иметь реалистичное представление о том, что происходит внутри тела, используя самые современные роботизированные инструменты. Смарт-очки позволят хирургу позиционировать себя в любом месте операционной зоны.v
Профессор Саня Дограмаджи из лаборатории Bristol Robotics говорит: «Проектируемый экзоскелет будет записывать положение пальцев и сообщать об этом роботизированному инструменту внутри тела с помощью технологии телеуправления. Другой частью нашей системы станут умные многофункциональные очки, которые будут передавать изображения изнутри тела. Это прогресс по сравнению с нынешними системами, которые используют дисплей для передачи изображения к хирургу».
Технологии для телеуправляемых очков предоставит компания Optinvent, Франция.
Трехлетний исследовательский проект, запущенный в январе 2017 года, опирается на предыдущую работу Bristol Robotics по теме «Медицинская робототехника».

Одной из вещей, которая делает достаточно сложным дело изготовления двуногих гуманоидных роботов, является необходимость постоянного поддержания равновесия. Шагая вперед, человек постоянно раскачивается в стороны и наклоняется в сторону направления движения. Разработчики большинства роботов, за редким исключением, пренебрегают этими особенностями ходьбы, и именно поэтому даже наилучшие образцы гуманоидных роботов не могут похвастать грациозностью и пластикой своей походки.
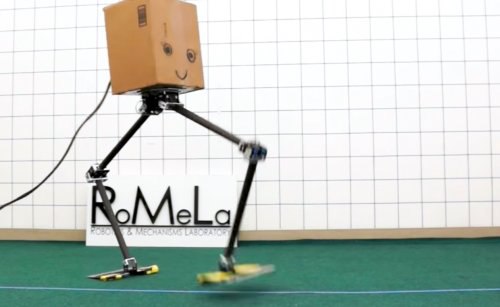
Группа Денниса Хонга (Dennis Hong) из лаборатории Robotics and Mechanisms Laboratory (RoMeLa) Калифорнийского университета в Лос-Анджелесе уже достаточно давно занимается проблемами ходьбы и шагающих роботов. И их последним творением является робот NABiRoS, очень далекий от антропоморфной конструкции, но за счет простоты этот робот двуногий способен ловко и проворно передвигаться даже по пересеченной местности.
Ученые создали робота с адаптивными суставами
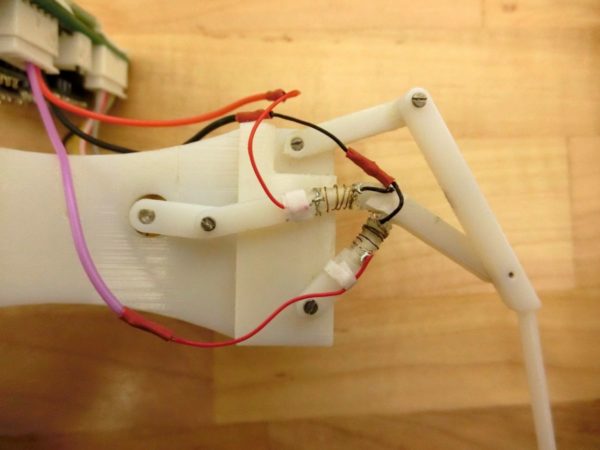
Новый робот плавит свои конечности за несколько секунд, воздействуя на них электрическим током, а затем укрепляет их после прекращения потока электричества. Так робот адаптируется к условиям окружающей среды.
робот, который с помощью электричества может плавить и укреплять свои суставы
Разработчики из Университета штата Колорадо (CSU) представили нового робота, который может изменять свой «скелет» за небольшой промежуток времени. Таким образом он подстраивается под решение определенных задач. Все сочленения робота твердые, но под воздействием электрического тока они становятся податливыми. В это время робот принимает нужную форму, затем «суставы» вновь становятся твердыми.
В дальнейшем ученые планируют начать работу над роботом, который сможет передвигаться и по суше, и по воде, и по воздуху. Бот-амфибия сможет трансформировать свои конечности в зависимости от того, где ему предстоит передвигаться.
Робот создан в лаборатории адаптивной робототехники Университета штата Колорадо (CSU). Цель лаборатории — создать новых маленьких и адаптивных роботов, которые могут менять свою форму, структуру или функциональность для выполнения множества задач (ходьба, полет, плавание) в различных условиях (на земле, в воздухе или под водой).

OpenCV. Китайские объективы с искажениями менее 1%
Вместо калибровки алгоритмов под индивидуальные искажения оптической системы, просто заменяем объектив на более качественный, с коэффициентом искажений менее 1%. Это позволяет упростить калибровку и разгрузить процессор от посторонних вычислений. Дороже на 5 USD, зато сколько сразу отвалилось проблем.














