


Удивительный мягкотелый робот-змея из Гарварда
 ROBOTIQUE | Робототехника
ROBOTIQUE | Робототехника

Новый мягкотелый робот из Гарварда получил вдохновение от увлекательного искусства – древних японских бумажных киригами. В отличие от оригами, киригами используют разрезы, а не складки для достижения желаемого результата. Здесь команда Гарварда применила форму червя для создания мягкотелого робота, который ползает по земле, как и любой робот-змея, — сообщает Robotics.ua.
Конечно, прототипу далеко до таких механизмов, как спасательный робот-змея из Стэнфорда или продвинутый робот из университета Тохоку, но он тоже имеет много перспектив в будущем.
Раньше мы встречали применение киригами в солнечных батареях и графеновой нанотехнологии, но, насколько нам известно, проект Гарварда – это первая комбинация сразу двух направлений.
Простота конструкции
Ключом к передвижению робота является его «кожа».
При растягивании внешняя поверхность использует трехмерную текстуру, лучше подходящую для отталкивания от земли. Поэтому это больше напоминает змею. «Мы показали, что принципы киригами могут быть интегрированы в мягкотелые роботы для достижения движений более простым, быстрым и недорогим методом», — говорит Ахмад Рафсанджани, представитель Школы инженерных и прикладных наук Джона А. Полсона при университете Гарварда.
Простота исходит из того, что роботу нужен только один двигатель для перемещения, в отличие от подобных мягких роботов, которым требуется несколько. Кожа, и, следовательно, применение киригами, делает это возможным. Собственно, сцепление с землей и заставляет робота двигаться вперед.
Принцип работы робота
Исследователи использовали лазерный резак для создания небольших разрезов в листе пластика. Затем лист обернули вокруг расширяющейся силиконовой трубки, которую можно раздувать и сдувать. Когда она надувается, вырезы раскрываются и цепляются за землю. При спускании робот запускается вперед. Трубка сама была обернута волокном кевлара, чтобы сохранить форму устройства.
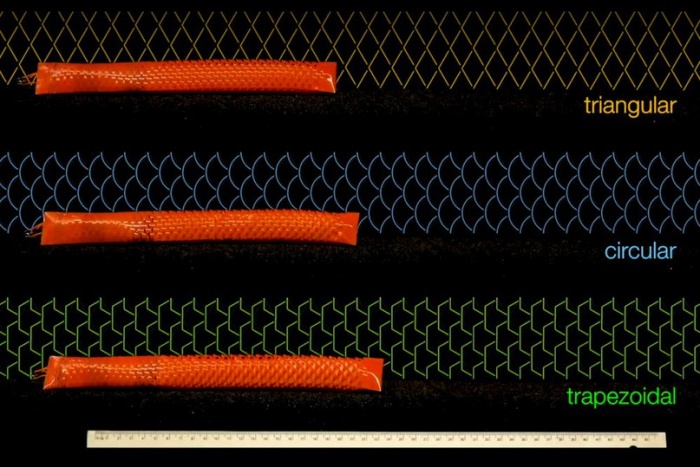
Команда провела эксперименты с различными сокращениями формы, чтобы найти наилучший результат. После треугольных и круглых разрезов команда остановилась на трапециевидных чешуйках, которые ближе всего к реальным масштабам змей. Они создают более грубую поверхность, которая дает больше сцепления.
Согласно robotics.ua, команда экспериментировала как с привязными, так и автономными прототипами. В привязных вариантах шнур использовался для подачи воздуха, чтобы раздувать трубку. Но чтобы окончательные версии были полностью автономными, хвост был снабжен электропитанием, элементами управления, приводами и датчиками.
Хотелось бы надеяться, что мягкотелые роботы, подобные этому, смогут быть использованы для изучения сложных и опасных мест для разведки, поиска и спасения, или, если технология сможет быть миниатюризирована, для сложных инвазивных медицинских процедур.


